
���")
�S�ޟo����")

KUKA KL-100���Ի�܉
KUKA ���Ի�܉ KL 100 ��һ�����b�ڵ��桢�컨����ϵĪ������S���Ի�܉���ڰ��\���bж�����ϼӹ����z�y��z���I���÷dz��V����
KL 100 ����C���˵ĸ����S�\�У��m���� KR AGILUS ϵ�е����ЙC���ˡ��ɴˣ����ƾ��������ęC���˿�����ؓ؟��(zh��)�С�
����Ŀ��
�쿨 KR AGILUS ϵ���е� KR 6 R700 sixx �C���˰��b�� KUKA �� KL-100 ��܉�ϣ����� ROBROOT �\��ϵ�y(t��ng)����ʹֱ����܉�͙C���ˌ��F(xi��n)ͬ�����ơ�
ʹ��WorkVisual���þ��Ԇ�Ԫ��So easy↓↓↓
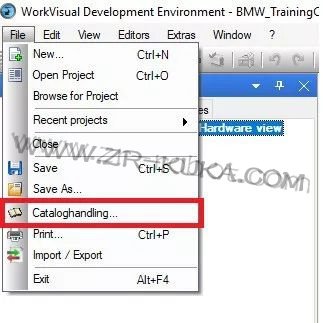
Step 1 �c���ļ�→Ŀ䛹���
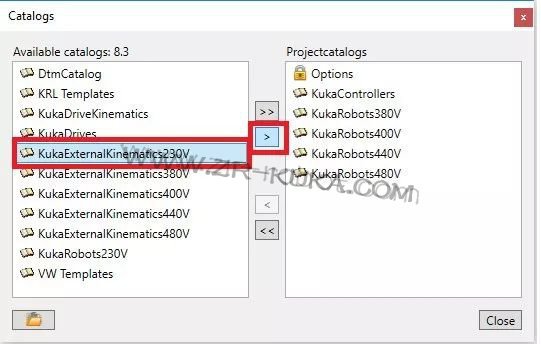
Step 2 �x��KukaExternalKinematics230V �c������^�����ӵ��F(xi��n)��Ŀ�
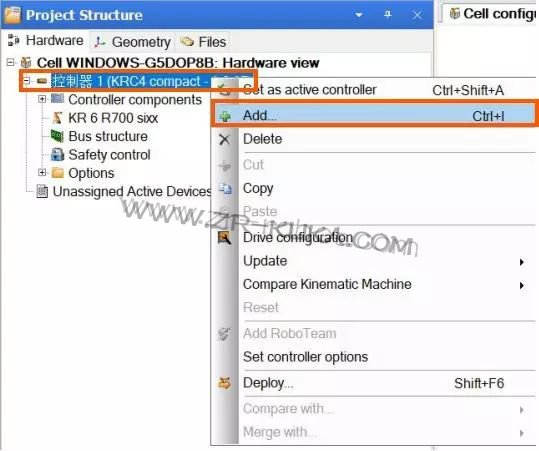
Step 3 ���c���Ŀ�Y��→����
Step 4 �x��KukaExternalKinematics230V → KL100 → Add
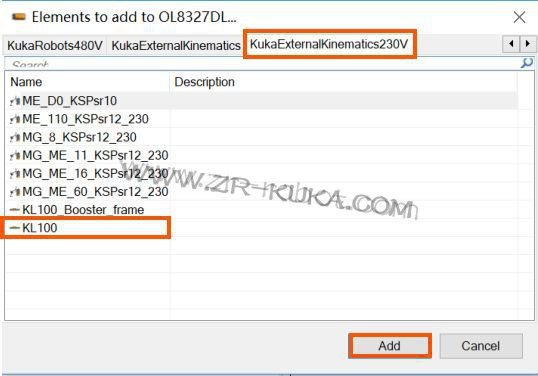
Step 5 KL100�������M���Ŀ�Y��
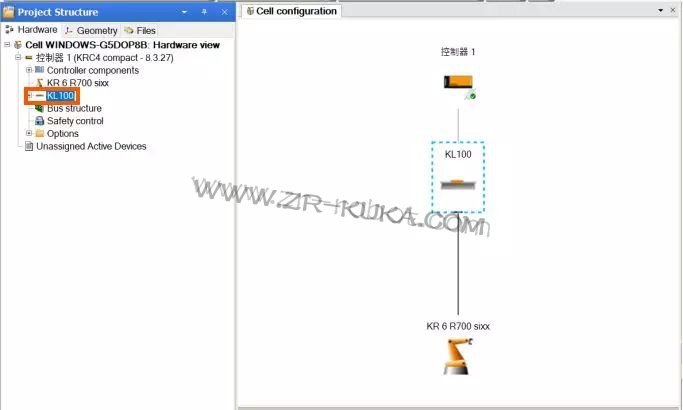
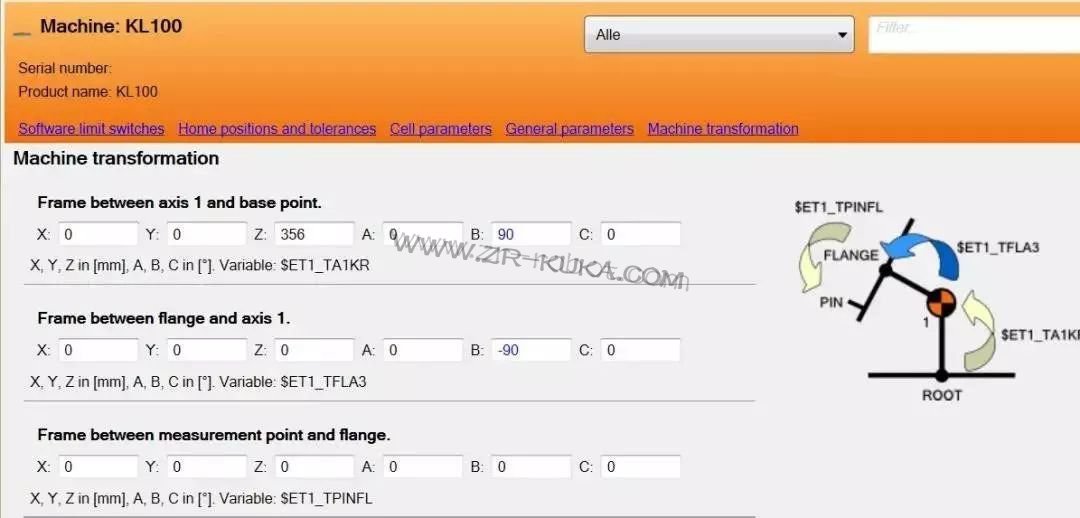
Step 6 ���D�Q�Pϵ���҈D����KL100�ą���(sh��)�
Step 7 �ٰ��Ŀ���d���C���˿��ƹ�
���ܳ��F(xi��n)�Ć��}
������r���Ԇ�Ԫ����Ҫ�eУ�ʡ��� WorkVisual ���ú� ROBROOT �\��ϵ�y(t��ng)���D�Q��(sh��)ֵ���ɡ�
���Еr����ʹ��ֱ���S�yԇ�ⲿ�\��ϵ�y(t��ng)�r�����ܹ��ߵ� TCP λ�Õ����F(xi��n)������׃������ijЩ���⑪��Ҫ�����܉�E���ȱ��^�ߵđ��È��ϣ��͟o���_���͑�Ҫ����[�ӑ��õȣ���
���}����
������r�£��C���˵� ROBROOT ����ϵ���c���Ԇ�Ԫ�� FLANGE ����ϵ��ͬ�� ���H�ϣ�ͨ�������F(xi��n)���b�`������@�ɂ�����ϵ�������p�IJ���@��ζ��ʹ���ⲿ�S�\������ϵ�r TCP ��λ�Õ����F(xi��n)ƫ� ����ڙC���˿������ﰲ�b�� KSS 8.3���t����ͨ�^���Ԇ�Ԫ�� Offset У�ʣ��팦�@Щ��M��ʾ��У����
ͬ�Ӳ����z©���ǣ����M�о��w����ǰ����Ҫ�_���ļ��£�
1. ����WorkVisual���ú����P�ⲿ�S�� ������d���C���˿������С�
2. ��ǰУ���^�Ĺ��߰��b�ڰ��b���m�ϡ�
3. �]�д��_���x���κγ���
4. T1ģʽ